
资料来源:天南AI茶馆
昨晚美股特斯拉开盘大跌4%,且今天看到了很多喷特斯拉的内容,最主要的原因就是在迈阿密的一个活动中,机器人因为遥操突然摔倒了。
其实是有原因的。
首先,从视频画面中可以看到几个细节:
1)Optimus的手是突然放下来砸到了桌面。
2)然后做出了类似于操作员摘VR头盔的动作。
3)然后手又砸到了桌面,但这次可以看到把一瓶水给压爆了。
4)Optimus重重的往后倒过去了。
这个视频确实没得洗,肯定是远程操作,但并不是一件大惊小怪的事,不要因为这件事而否定特斯拉的AI自主操作的能力建设。
原因是遥控操作模式下的人类权限的优先性,这是摔倒的导火索。
机器人目前可以分为好几种操作模式:
1)自主操作模式,大多数特定场景下进行特定任务的操作,比如抓取电池、转移等。
2)程序设定模式,用于公开性的表演等,比如10月初的打功夫、11月初股东大会和马斯克的热舞。
3)遥控操作模式,大多用于收集数据/公开场合展示新能力等,比如万圣节发糖、以及这次发水等。
一旦被设置为遥控操作模式下用于收集数据,那操作远的权限会被设置为最高,而这个时候的机器人完全被称为傀儡铁疙瘩,不会有任何自主能力。
所以在遥操状态下因为意外摔倒是非常正常的情况。
那再来聊大家喷的遥操问题
我补充点信息,特斯拉这种公开场合基本都是远程操作,一方面是为了场景下的安全性,但更重要的一方面是为了收集遥操数据用于训练模型。
特斯拉目前采用的策略是在比较成熟的场景会逐步采用自主AI进行操作,比如特斯拉餐厅中的爆米花场景。
从7-8月份上线后,爆米花机器人已经在不间断的工作和很长时间,我们从专业渠道了解到,最开始的爆米花Optimus确实都是遥控操作,但后面已经慢慢在调整遥控操作的比例。
这也是真实训练场景下所必须要走的路:收集一定的真实场景遥操数据,然后在base model上进行微调训练。
而在迈阿密这个昏暗场景下,因为会涉及到很多人的交互,会造成比较大的扰动,所以这个场景用遥操收集数据,并保证安全性。我觉得是非常正常的事情。
那特斯拉在这个场景下自主能力究竟如何呢?
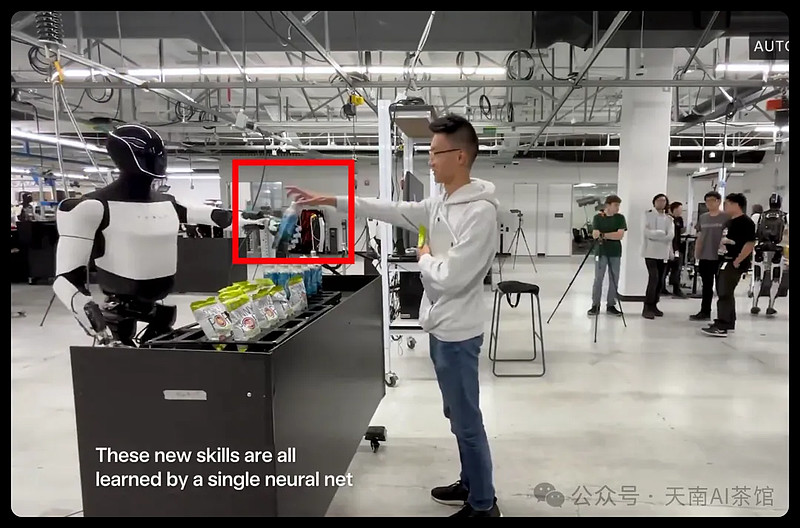
他们在24年10月份就给出了demo答案(视频的第1分钟处开始):
在实验室场景下,特斯拉已经可以实现自主识别所需要的商品,并进行抓取,这段视频在25年底来看,依然还是很惊艳的效果展示。
但demo始终是demo,没办法达到100%的可用率,所以在迈阿密的场景下使用遥操收集数据无可厚非。
大家大可不必过度反应。
不过,我们还是看到了风险
我提到的风险并不是遥操的风险,而是安全的风险。
摔倒 + 力气大,这两个对于目前的人形机器人而言,简直是致命伤。
这次的迈阿密摔倒完全是个意外,是因为摘下VR头盔后,Optimus手部碰到了桌面造成了反弹力量,所以才会猛然摔到。

但砸向桌面的时候,桌上的一瓶水直接被砸爆,水花四溅,这个力度已经远超过人类正常的力度,应该比被打了一巴掌更重一些。
正是因为这次摔倒,我们更看到了中间态机器人的重要性。那就是我们强调过很多次的轮式 + 夹爪的必要性。
轮式可以cover人类现代生活的70-80%场景,又不会出现非常大的摔倒安全问题。
而夹爪也可以cover人类70-80%场景,又不用解决灵巧手难以训练的问题。以及字节新发的穿鞋带demo不也是说明了夹爪可以做很多事情吗?
轮式 + 夹爪,虽然形态上不够第一性原理,但功能上已经能够满足大部分需求。
写在最后
这段摔倒的视频引起这么大范围的讨论和热议,这也说明了大多数人都是在一个吃瓜的状态。
而当你真的了解这里面的不同模式的设置,以及理解特斯拉optimus当时要面对的昏暗以及多交互的场景,或许会对这次摔倒有更高的包容性。
让我们多一些包容,少一些噪声,多给这些新兴行业一些成长的空间吧。
