

一、技术与场景的双向奔赴:一场精准的战略对接
当通研院的具身智能灵巧手在《自然机器智能》(Nature)期刊上展现出 0.1 毫米级触觉感知与双手协同操作能力时,远在杭州的品茗科技正为建筑施工场景中的 “最后一米” 智能化难题寻找答案。2025年9月,通智科技以15.92%持股比例成为品茗科技第二大股东的布局,让这场技术与场景的邂逅成为现实 —— 通研院通过 MANIPTRANS 框架实现的人类技能迁移技术,或许未来将与品茗科技深耕二十余年的数字建造生态形成完美互补。
(Nature Machine Intelligence截图)
通研院灵巧手:重构机器人物理交互能力的核心技术体系
作为通研院历时数年研发的核心成果,这款灵巧手并非传统机械臂的升级,而是针对 “非结构化场景精细操作” 打造的全新物种。多位业内专家指出,其技术体系至少包含四大突破性设计:
1.仿生驱动与结构设计:灵巧手采用 “12 自由度 + 柔性关节” 架构,每根手指配备 3 个独立驱动电机(扭矩精度达 0.001Nm),指节采用航空级铝合金与柔性硅胶复合材质,既具备承重 5kg 的强度(满足建筑构件抓取需求),又能模拟人类手指的弯曲弧度(弯曲角度范围 0-150),可适配螺栓、钢筋、预制构件等 12 类建筑核心部件的抓取形态;
2.超精密触觉感知系统:手掌 70% 区域覆盖柔性压电薄膜传感器(采样频率 1000Hz),每平方厘米集成 200 个感知单元,不仅能实现 0.1 毫米级的位移感知(相当于能识别螺栓螺纹的细微齿距差异),还可实时采集压力(0-50N)、温度(-10℃-60℃)、表面纹理三类数据 —— 在建筑场景中,这意味着灵巧手能通过触觉判断混凝土预制件的表面平整度,或在拧动螺栓时感知力矩变化,避免构件损伤;
3.MANIPTRANS 人类技能迁移框架:这一核心算法突破了 “机器人动作需逐帧编程” 的行业瓶颈,通过 “动作捕捉 + 力反馈采集 + AI 转化” 三步实现技能复刻:首先用 8 台高精度运动捕捉相机(精度 0.01mm)记录资深技工的操作轨迹(如钢筋绑扎时的手腕转动角度、螺栓紧固时的力度变化曲线),再通过 MoCap 动作数据集(包含 200 名建筑技工的 5000 小时操作数据)训练模型,最终将人类技能转化为机器人可执行的 “动作指令包”(指令延迟<50ms),单手任务成功率 58.1%、双手协同 39.5% 的背后,是算法对 “人类经验 + 环境变量” 的双重适配(如考虑工地风力对高空操作的影响);
4.两阶段学习架构的容错能力:“轨迹模仿器 + 残差模块” 的组合设计,让灵巧手具备动态调整能力 —— 轨迹模仿器负责复刻基础动作(如构件抓取路径),残差模块则实时修正误差:当遇到建筑构件尺寸偏差(如预制板实际尺寸与 BIM 模型误差 2mm)或突发干扰(如工地粉尘附着导致摩擦力变化)时,模块会根据传感器数据调整动作参数(如增大抓握力度 0.5N、微调手指角度 1)。
笔者认为,通研院灵巧手的核心竞争力恰是未来建筑行业的刚需所在:其能将人类双手的精细操作(如拧动螺栓、插入构件)转化为机器人可执行的动作,且适配建筑场景的复杂环境。而品茗科技的智慧工地业务已覆盖大量基建与工业项目,其 AI 巡检机器人、BIM 建模工具等产品正迫切需要更灵活的物理交互能力突破应用瓶颈 —— 例如 AI 巡检智能体虽能识别构件缺陷,却无法现场修复;BIM 模型虽能规划施工路径,却缺乏 “物理执行” 的载体,灵巧手的技术注入恰好填补了这一空白。
二、双核心场景落地:从实验室到建筑工地的跨越
(一)智慧工地:高危环境的 “灵巧替代者”
在建筑工程行业等超大型项目中,高空螺栓紧固、管道精密对接等高危精细作业长期依赖人工。笔者认为,通智科技未来可以将搭载触觉感知系统的灵巧手与远程控制系统相结合,通过技术转化与适配细节进一步落地,智慧工地场景未来可优化的方向如下:
1.操作升级:通过 MANIPTRANS 框架迁移资深技工的螺栓紧固技巧时,灵巧手的触觉传感器会实时采集螺栓拧紧过程中的力矩变化(精度 0.01Nm),当检测到力矩达到建筑规范要求(如 M20 螺栓需 50Nm 紧固力)时,自动停止转动,避免过松导致的结构风险或过紧造成的螺栓断裂;针对管道对接场景,传感器还能感知管道接口的密封胶厚度,通过压力数据判断对接是否到位;
2.效率提升:相比人工高空作业平均 30 分钟 / 处的效率,灵巧手结合 BIM 三维模型定位(定位精度 0.1 米),可通过 “预编程动作 + 实时修正” 实现快速作业:例如在钢结构高空安装中,灵巧手先依据 BIM 模型规划抓取点,再通过触觉传感器调整构件姿态,将对位时间从人工 15 分钟压缩至 3 分钟,单处作业总时长降至 12 分钟,且支持 24 小时连续工作(内置散热系统,可在 45℃高温环境下持续运行);
3.安全保障:在隧道支护、深基坑监测等危险场景,灵巧手的防护设计(IP65 防尘防水等级)可应对粉尘、渗水等恶劣环境,其搭载的激光雷达还能实时扫描周围环境,避免与施工设备碰撞;在钢筋绑扎作业中,灵巧手可替代人工进入深基坑(深度>5 米),通过 “手指捏取 + 手腕旋转” 完成钢筋绑扎(绑扎间距误差<2cm),降低 80% 以上的安全事故风险。
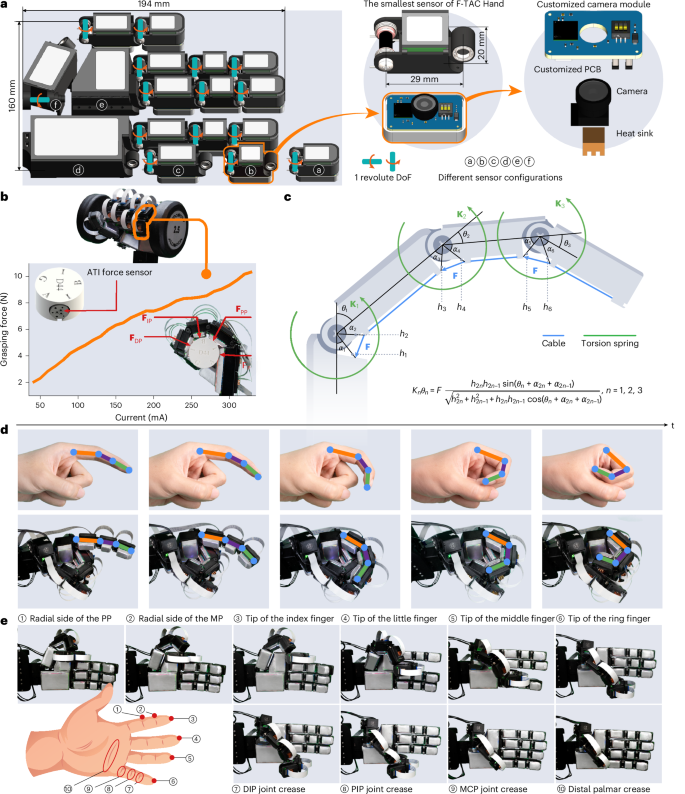
(高精度触觉传感:利用光度立体原理,通过编码器-解码器神经网络和泊松求解器重建接触面几何形状,实现高保真表面几何图形的重建)
(二)数字建造:BIM 模型的 “物理执行者”
现存的 BIM 软件已实现从设计到施工的数字化协同,但“虚拟模型与实体建造脱节”仍是行业痛点。通智科技未来的技术转化将能够实现“数字孪生 + 物理执行”的闭环,后续技术落地可以依托灵巧手的三大能力进行支撑:
1.模型校验:灵巧手可依据BIM 模型生成的施工方案,在数字孪生平台中预演构件装配过程 —— 通过 134 万帧 DexManipNet 数据集(包含建筑行业 32 类典型操作场景)训练,灵巧手能在仿真环境中模拟 “构件碰撞检测”:例如当 BIM 模型中管线排布存在 1cm 间距偏差时,灵巧手在预演抓取管线时会触发 “碰撞预警”,并反馈调整建议,提前规避现场施工中的返工风险;
2.精准施工:在装配式建筑场景,灵巧手可配合 AI 定位系统(基于北斗导航,定位精度 1cm),通过 “视觉 + 触觉” 双反馈完成作业:抓取预制构件时,视觉传感器识别构件二维码确认型号,触觉传感器感知构件重量(误差<50g)判断是否抓取稳固;拼接过程中,残差模块根据 BIM 模型实时调整构件位置,将位移误差控制在 0.49 厘米内,解决人工装配因 “视觉偏差 + 力度不均” 导致的精度不足难题;
3.智能运维:针对数字监管平台监测到的设备故障(如工地水泵阀门松动),灵巧手可通过 “远程操控 + 自主决策” 执行维修:平台将故障位置、构件型号同步至灵巧手控制系统,灵巧手抵达现场后,先用触觉传感器确认阀门松动程度,再调用预存的 “阀门调节” 技能包(包含 10 种不同规格阀门的操作参数),完成维修动作,响应速度较人工提升数倍,且无需工程师亲临现场。
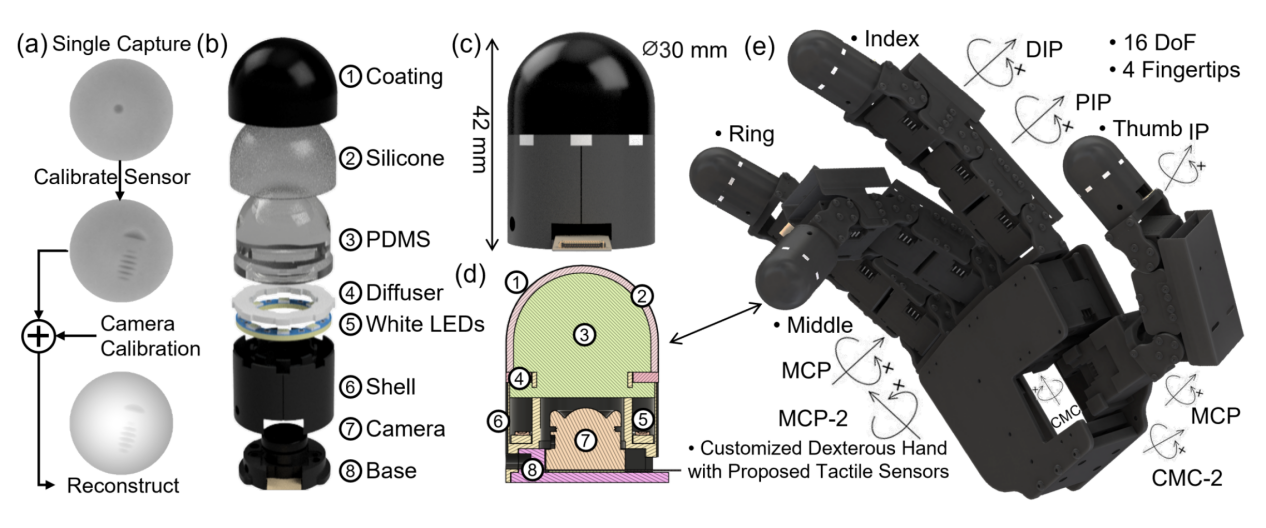
(灵巧手硬件部分概览)
三、产业价值重构:AI + 建造的生态革命
笔者认为,关于现有主营业务场景下的整合意义,在于推动建筑行业从“信息化”向“智能化”的质变。通智科技对于灵巧手的产研应用转化与传统建造行业的全流程数字化服务未来将形成以下协同效应:
1.技术层面:真实行业数据反哺通研院算法迭代,例如将 1700 余个 AI 助手用户的操作数据(包含不同气候、地质条件下的施工经验)融入 DexManipNet 数据集,进一步提升灵巧手在极端场景的适配性 —— 如针对北方冬季施工(-5℃),算法会调整灵巧手的关节润滑参数,避免低温导致的动作卡顿;
2.商业层面:产业整合后可推出 “灵巧建造解决方案”,包含灵巧手硬件(基础版、工业版、高危场景定制版三款)、 BIM 软件(内置灵巧手动作接口)、AI 运维平台的一体化包,瞄准年规模超千亿的智能建造市场;其中灵巧手硬件采用 “模块化设计”,可根据项目需求更换手指末端执行器(如抓取钢筋的 “钳形头”、拧螺栓的 “套筒头”),降低客户采购成本;
3.政策层面:这一实践响应了国务院《“人工智能 +” 行动意见》要求,成为通用AI技术与实体经济融合的示范样本,为将来国家重大工程项目提供技术参考依据。
正如通智科技“围绕技术创新、链接产业场景” 的使命所言,未来灵巧手技术在建筑行业的落地,不仅是单一技术的商业化,更是开启了“人类技能数字化传承 + 机器人规模化执行” 的新范式。当实验室里的指尖精细动作,转化为建筑工地上的高效作业,这场由通智与品茗引领的场景融合革命,或许正要重塑整个建造产业的未来。
