
被迫撕衣自证?机器人的“灵魂”原来由它赋予
来源: 汉威科技集团
导读
机器人也需“开箱验货”?当它们因表现过于自然而“被迫营业”,其行动自如的背后,究竟隐藏着怎样的感知秘密?汉威科技带你一文看懂,如何为机器人注入平衡的“灵魂”。
01
机器人的“平衡感”
从何而来?

还记得某机器人发布会上,那个行走姿态流畅如真人,甚至被网友戏称“需要撕衣自证”的机器人吗?
它能如此平稳地迈出“猫步”,背后依靠的并非人类的肌肉与神经,而是一个叫做IMU(惯性测量单元) 的核心传感器。
这个小小的传感器,就是机器人的平衡感知中枢,是让它真正“活”起来,能走能跑能后空翻的灵魂所在!
它就像一个永不掉线的贴身秘书,每秒几百次地向机器人的“大脑”汇报。
“头往左偏了3度!”“身体正在加速前倾!”“快,要歪倒了,赶紧迈右脚!”
正是基于这些毫秒级的精准数据,机器人才能瞬间调整姿态,走出“六亲不认”的稳健步伐,甚至完成跳舞、后空翻等高难度动作....
02
汉威科技惯性测量单元
布局机器人感知新生态
汉威科技集团依托强大的研发创新能力和全自动MEMS芯片智造产线,推出了核心技术自主可控的高精度MEMS惯性测量单元。
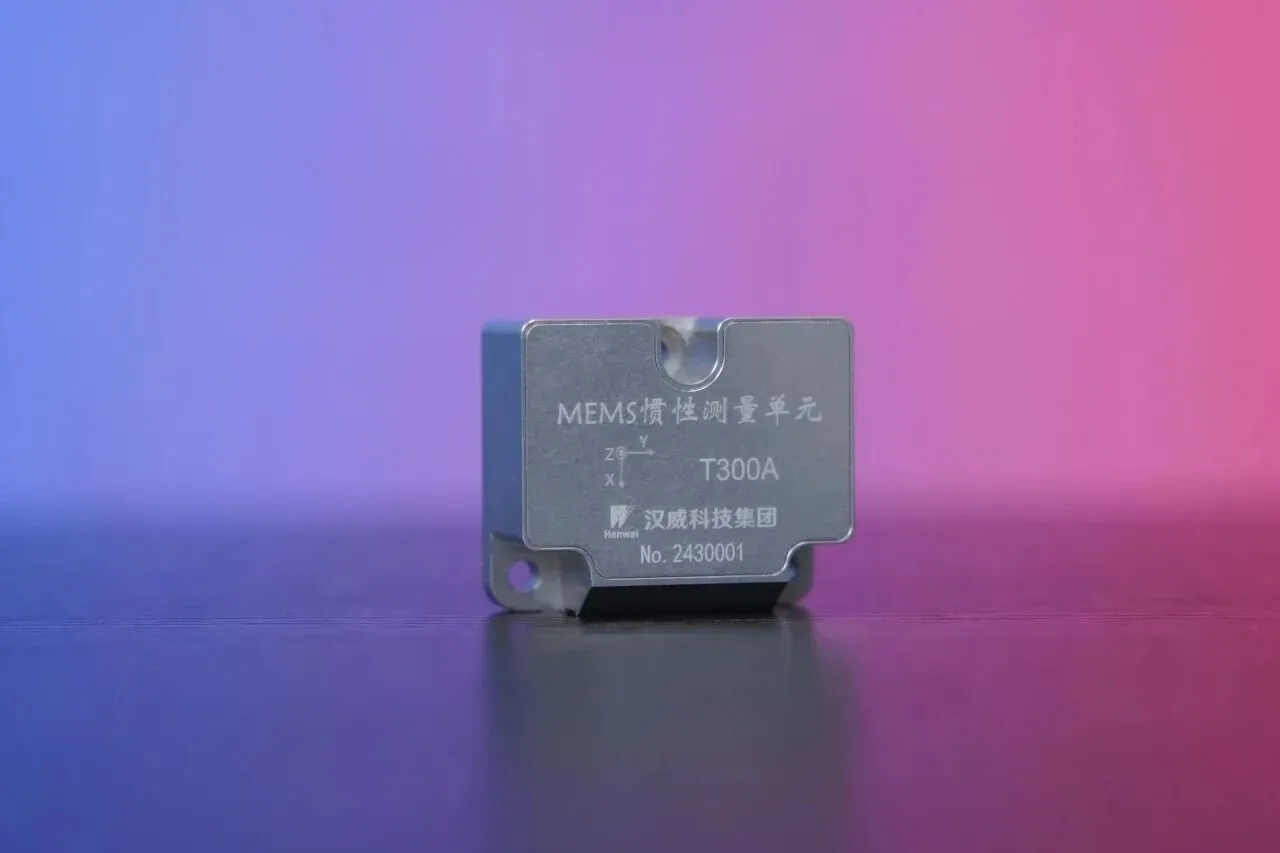
其基于MEMS工艺与SIP系统级封装,集成了多种智能算法与自诊断程序,具备精度高、响应快、可靠性强等优势。
强大的研产实力不仅保障了产品性能,更支撑了从功能定制、产品定制到快速交付的全层次服务,能高效满足具身智能传感器等领域的多样化需求。
其实,机器人的“智能”远不止于平衡。
在具身智能的浪潮中,汉威科技早已在机器人感知领域展开全面布局,构建了覆盖“嗅觉-触觉-平衡-力控-视觉”的多维传感器矩阵。

嗅觉:电子鼻嗅觉传感器可检测多种可燃气体,有毒气体,VOCs等气体指标,用于环境安全监测与气味识别领域。
触觉:柔性触觉传感器,实时感知接触力度与分布,用于灵巧抓取与人机交互。
平衡:IMU惯性测量单元,实时输出姿态与加速度数据,快速调整机器人运动姿态,保持平衡。
力控:六维力传感器,以高精度应变片为核心元件,同步检测多维力与力矩,实现精密装配、自适应抓取等复杂力控任务。
视觉:非制冷红外热成像模组,可利用红外辐射检测物体、物质热分布,突破环境限制,全天候精准远距离探测,用于具身智能机器人环境感知、工业检测、目标识别、家居看护、安防救援等场景。
这些传感器协同工作,可以为具身智能机器人构建起一个立体、多维的感知系统,使其在应对复杂环境、复杂任务时也能游刃有余。
结语
未来,机器人不再只是执行预置指令的工具,而将成为具备感知、决策与交互能力的“具身智能体”。汉威科技集团致力于通过领先的传感器技术与系统解决方案,共创人机协同、和谐共生的新纪元。
