
过去一年,以人形机器人为代表的具身智能在实验室中的“场景理解”与“任务规划”上进展显著,但面对真实的工业产线任务时,往往面临“想得到但抓不准、算得出但跟不上”的困境。这背后,是长期横亘在实验室环境与真实应用场景之间的鸿沟:人形机器人在空间层面的度量失准与时间层面的响应迟滞。

基于百亿参数底座模型,优必选对其具身智能大模型Thinker进行了架构升级。本次升级聚焦“小参数、高性能、全开源”,旨在打造一个能为工业人形机器人提供快速反应与精准空间感知的下一代具身智能大脑,以应对动态工业场景的挑战。Thinker将作为智能基座,为优必选的群脑网络和协作智能体Co-Agent提供认知与决策支持,进而驱动单机自主与群体智能的协同进化。
Thinker 实现了 “小体积大能量” 的关键性能突破,优必选此次将其开源,让广大开发者可基于该基座探索人形机器人大脑的应用,一同加快具身智能技术的迭代节奏,携手共建人形机器人的全新未来。
小参数+高性能+全开源,狂揽9项基准全球第一
当前,机器人领域大模型表现欠佳,尤其在空间理解、视觉感知等关键任务上精度不足;且模型参数量普遍较大,难以满足机器人对实时性的高要求;其次,互联网上虽有海量数据,但质量参差不齐,制约了模型通过Data Scaling 实现性能有效提升。
优必选具身智能大模型Thinker以“小参数、高性能、全开源”突破具身大脑领域限制。近日,在涵盖10B以下具身智能大脑模型的权威基准评测中,Thinker一举拿下9项第一,重新定义了该领域的性能标杆。这些基准全面评估了具身智能的两大核心能力:一是机器人第一视角下的场景认知与任务规划能力,二是支撑物理交互的精准感知与空间理解能力。
该权威榜单囊括了英伟达、字节跳动、北京智源及北京人形等顶尖团队近期发布的代表性模型,集中体现了具身智能行业的前沿水平。
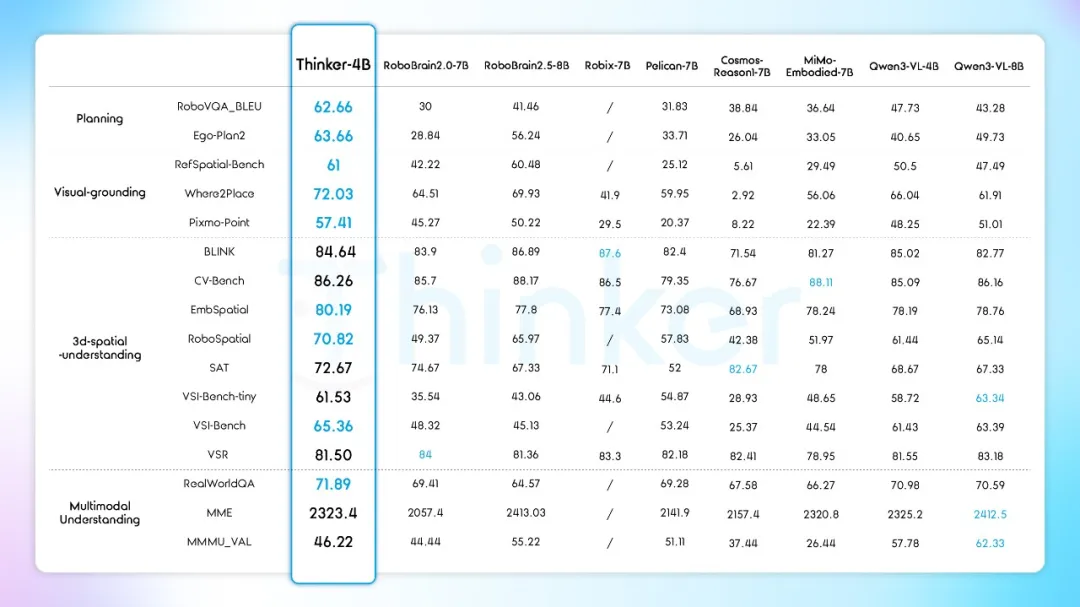
注:数据更新至01/30/2026,结果基于flageval, evalscope框架评测
从海量数据到高质量“大脑”,Thinker的数据转化之道
具身智能的核心竞争力根植于高质量数据的支撑,但行业普遍面临原始数据噪声大、多模态对齐困难、标注成本高、小样本泛化难等痛点。优必选以数据为核心,构建了覆盖"精炼提纯 - 自动化标注 - 数据驱动训练” 的全链路解决方案,通过极致的技术优化破解行业难题,为轻量化具身大模型的高性能表现筑牢数据基座。
1、从20B 到 10M:多模态数据的 “精炼提纯” 流水线
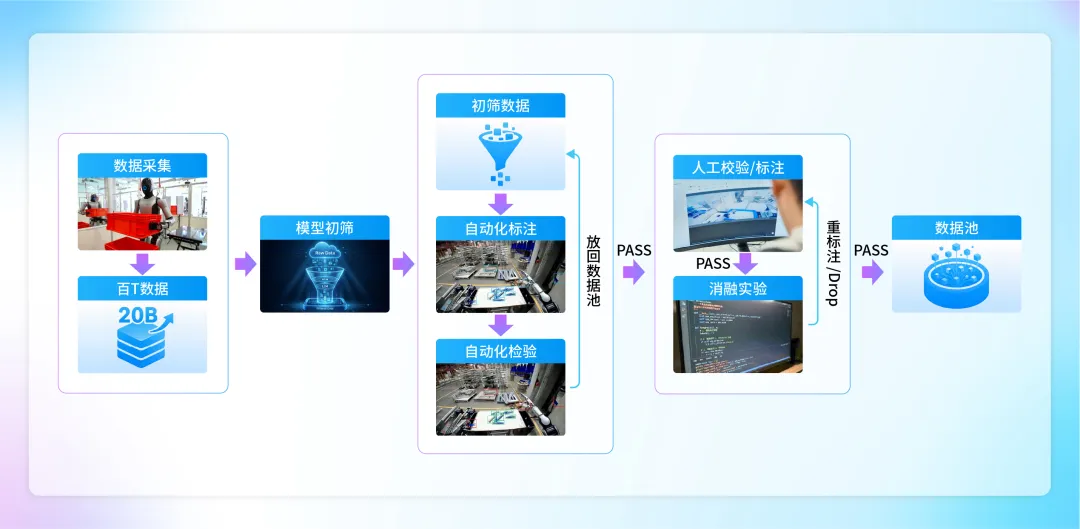
面对高达20B、含噪声、难对齐、模态缺失的原始数据,优必选构建了全流程自动化“精炼提纯”流水线。通过“数据筛选”与“质量评分”两步,实现从20B到10M级别高质量数据的极致提纯。
广度筛选:基于定制化规则,从视觉、语言、动作、环境等多模态数据中,快速过滤出约1%的候选数据池。
深度评分:引入大模型构建多维度评分模块,从质量、任务、场景等多维度进行精细评价,最终筛选最高价值的训练数据。
2、自动化标注闭环:人工参与率<1% 的高效方案
针对具身数据标注难度大、成本高的行业痛点,优必选搭建了 “弱监督 + 自监督 + 少量人工校验” 的自动化标注体系:
核心技术:采用 “大模型辅助标注 + 多模型交叉验证” 策略,对视觉场景分割、动作序列分类、指令意图解析等任务实现端到端自动化标注;
人工校验机制:仅对标注置信度低于阈值的样本进行人工复核,最终将人工参与率控制在1%以下,较传统全人工标注方案成本降低 99%,标注效率提升超百倍;
动态迭代优化:将模型训练后的误差反馈至标注流水线,持续优化标注算法参数,形成 “标注 - 训练 - 反馈 - 迭代” 的闭环,标注准确率随迭代逐步提升。
3、Data-centric 核心优势:小样本撬动强泛化能力
具身智能的核心需求是 “在复杂真实场景中精准交互”,而数据质量直接决定模型的环境适配与任务迁移能力。优必选的训练范式以下三个核心维度系统保障模型的泛化与迁移能力:
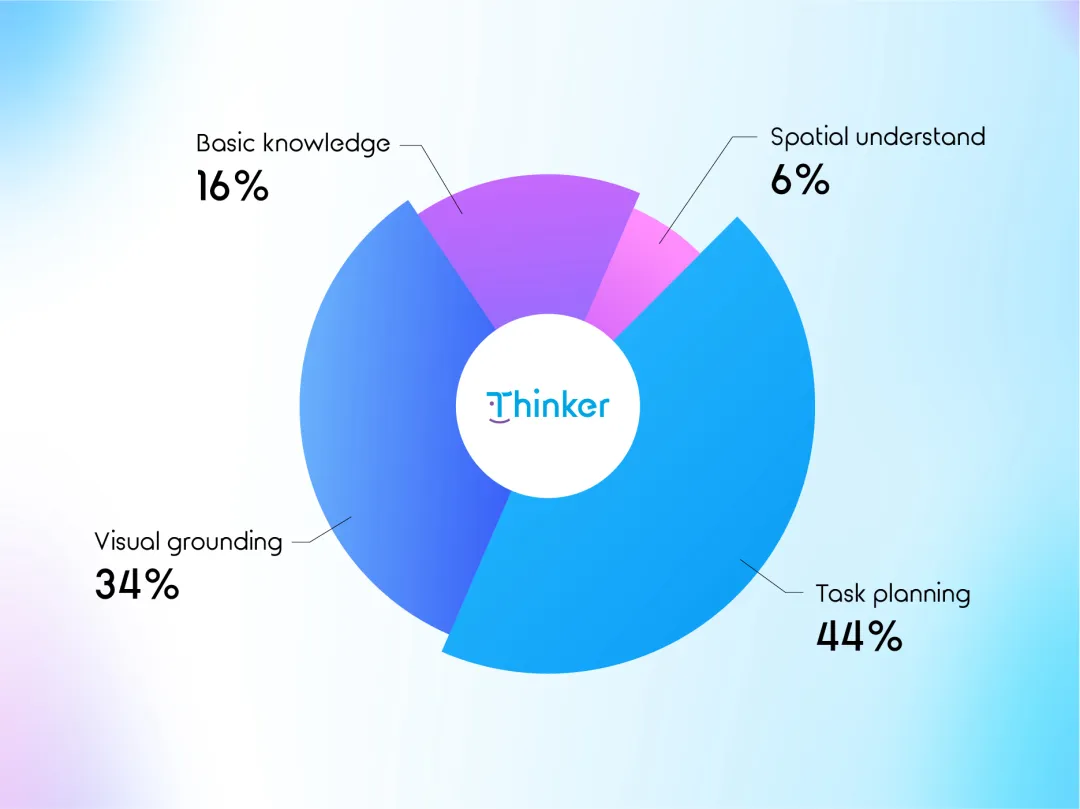
样本多样性覆盖:基于精炼的10M高质量数据,全面覆盖具身智能四大核心任务类型:任务规划, 视觉定位,空间理解,通用知识;
任务导向型采样:针对具身智能 “感知 - 决策 - 执行” 闭环中的关键环节(如精细操作、模糊指令理解、突发场景应对),进行样本动态采样,提升模型核心能力;
L4级标注标准: 通过设计精细的4级数据标签,从任务-功能-分类-模态4个维度进行精确划分,实现对训练数据配比的精准把控。
转动数据飞轮,驱动模型持续进化
依托具身智能大模型Thinker的技术积淀,优必选创新性打通数据回流机制,通过在工厂搬运、工件分拣等真实场景中的深度部署,确保技术优势转化为落地优势,并反哺模型持续进化。包含:
1、基础能力深度解析
详细拆解模型多模态理解、空间推理、任务规划等核心能力,明确不同具身场景下的能力边界与适配阈值,为下游应用提供精准的技术参考。
2、精准问题定位指南
提供场景化问题诊断方法论,针对落地中常见的指令理解偏差、操作精度不足等问题,给出可直接套用的排查流程与解决方案。
3、实操优化全流程指导
涵盖Prompt工程精细化优化技巧,以及SFT微调阶段的数据构造规范、不同任务类型样本比例配比建议,助力快速完成场景适配。
4、双向数据回流机制
回收下游场景中的全新数据、新兴任务需求及交互反馈,将其转化为模型可学习的训练资源,反向注入Thinker迭代过程,持续扩展模型基础能力与泛化性。以工厂搬运为例,系统持续收集实际作业中的长尾案例数据,如料箱识别失败、抓取轨迹动态调整等。这些真实场景数据直接反哺 Thinker 模型的训练,推动其自主进化,不断增强基础性能与场景适应能力。最终基于Thinker大模型,Walker S2可在箱体搬运、工件分拣等下游应用场景中实现 99.99% 的作业准确率。

当前,具身智能正加速渗透工业智造、商用服务等千行百业,但技术门槛与成本限制成为行业普及的关键瓶颈。优必选坚持开源共享理念,将模型权重、训练工具链与应用案例全量开放,希望与更多开发者和企业共同拥抱具身智能的浪潮。
开源代码网址:https://github.com/UBTECH-Robot/Thinker
权重链接:https://huggingface.co/UBTECH-Robotics/Thinker-4B
论文链接:https://arxiv.org/abs/2601.21199
(来源:优必选的财富号 2026-02-01 17:20) [点击查看原文]
