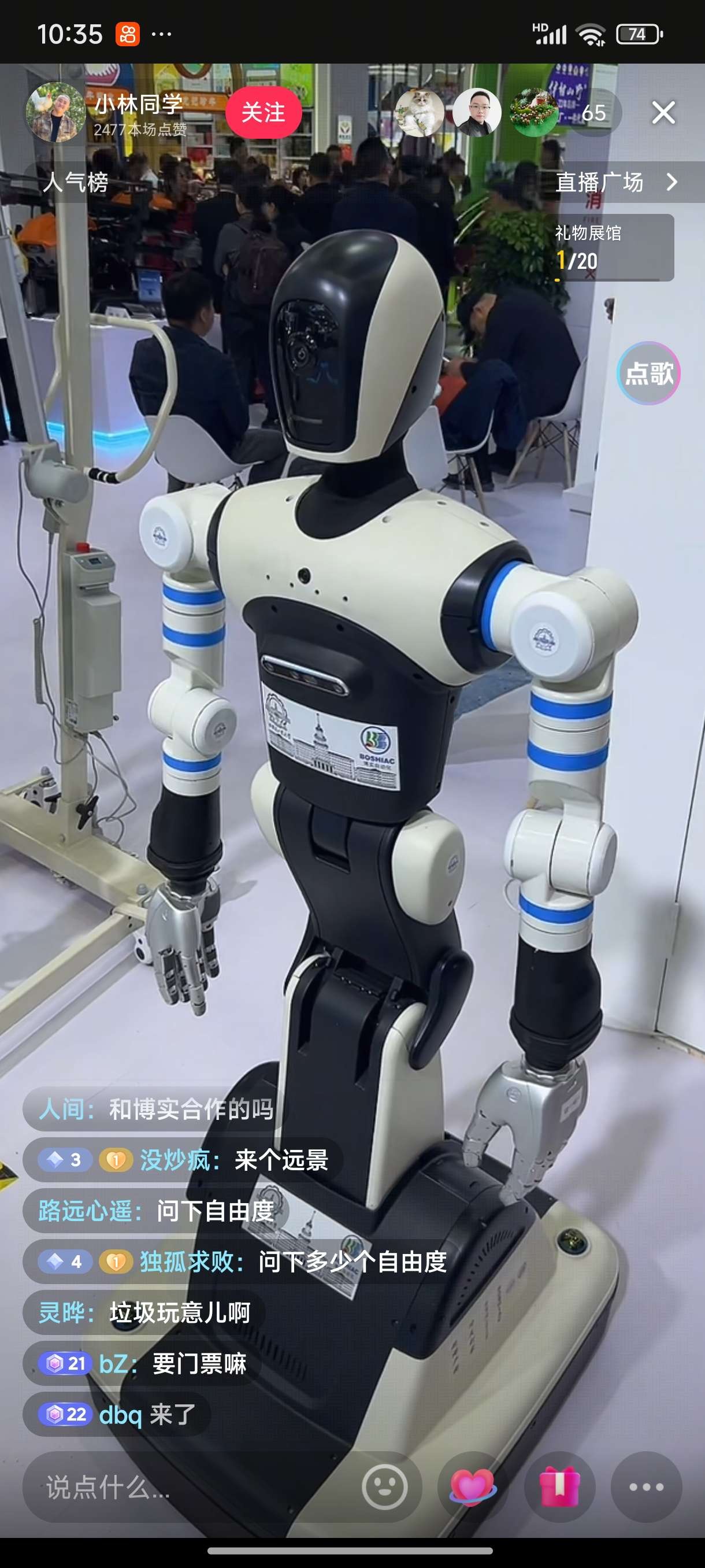
$博实股份(SZ002698)$ 与哈工大研发的2款(哈博)人形机器人已在今年哈博会上静态展示了,即将在今年第四季度动态展示。


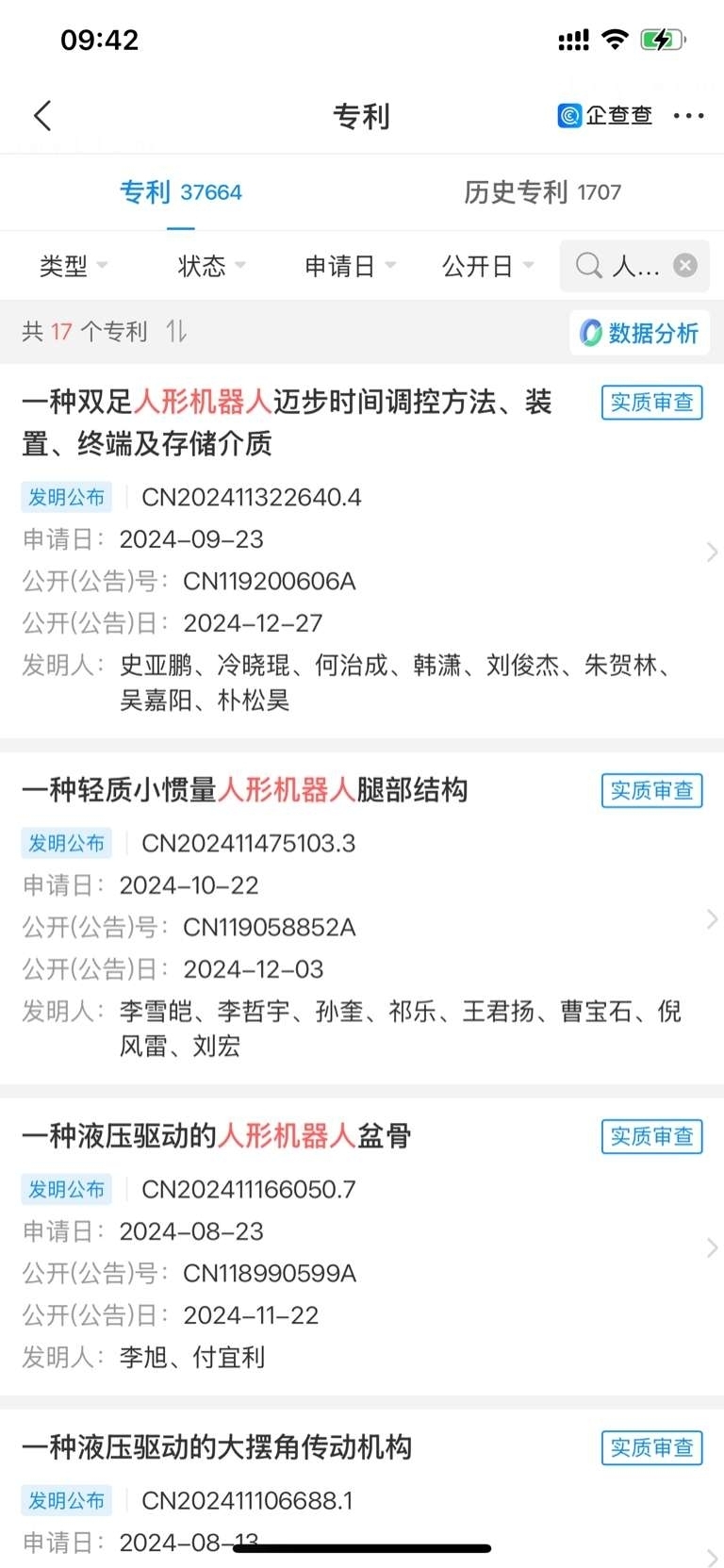
综合公开信息尤其是哈工大为研发人形机器人的几十项创新发明专利看,(哈博)人形机器人将突被五方面9项技术难点:
一、灵巧操作方面
- 五指“灵巧手”:自重仅1.2公斤,能灵活做出人手动作,指尖力提升100%,可挂载3公斤负载,内部集成传感器,通过柔顺控制实现类人柔顺抓取。
- TSM软机械手:创新地将复合肌腱与气动肌肉结合,设计出鲍登管和电缆肌腱组成的复合肌腱与气驱锥形波纹管紧凑集成方案,实现优异可变刚度范围;采用深度学习方法与闭环迭代反馈控制器相结合的控制策略,达到毫米级控制精度,能完成越障抓取等复杂任务。
二、运动控制方面
- 全身协同运动:致力于实现机器人全身各部位的协调运动,使机器人在行走、转弯、抬手等各种动作中更加自然流畅,保持平衡和稳定。
- 高适应动态平衡控制:研究能让机器人快速适应不同地形、路面状况以及运动状态变化的平衡控制算法,确保机器人在复杂环境下也能稳定站立和移动。
哈工大第20项专利,让人形机器人真正像人一样行走,又快又稳!
三、智能感知方面(人机对话)
- 复杂场景智能感知与导航规划:运用先进的传感器技术和算法,使机器人能够精确感知周围环境中的障碍物、地形特征等信息,并据此规划出合理的行动路径,实现自主导航。
- 基于深度学习的行为识别与反馈系统:通过深度学习算法,让机器人能够识别和理解人类的行为动作、手势等,并做出相应的反馈和响应,提升人机交互的自然度和效率。
四、能源动力方面
- 高功率密度电池:研发高能量密度的电池技术,以满足人形机器人在长时间运行中的能量需求,延长其工作时间和续航里程。
五、智能控制方面
- 机器脑智能控制技术:开发高性能的机器人控制系统,集成多种智能算法,实现对机器人的自主决策、任务规划、动作控制等功能,使机器人具备更高的智能水平和灵活性。
- 自主决策与规划能力:让机器人能够根据感知到的环境信息和任务要求,独立地制定行动计划和决策,适应不同的场景和任务变化。
(哈博)双足人形机器人(双腿是笔直的,不同于大多数其它人形机器人是弯曲的)采用哈工大在(2024年12月27日)公布的第20项人形机器人创新发明专利!
(一种双足人形机器人迈步时间调控方法)一一一解决人形机器人稳步快速行走难题,让人形机器人真正像人一样行走!
博实股份一一已超前布局人形机器人应用场景(2款人形机器人样机将于今年第4季度面世)!
博实股份与哈工大于23年8月共同研发2款通用型人形机器人原理样机。
为何要研发2款(不是1款)人形机器人?一一主要基于不同应用场景的人形机器人的深度学习、认知程度、感应程度和灵巧手等方面的原因。
博实股份与哈工大共同研发的2款人形机器人一一暂定名为哈博智(男)哈博慧(女)一一主要是落实五大应用场景:
哈博智(双足人形机器人,刚性灵巧手,哈工大专利)

一一主要用于在工业制造中,用于汽车、电子设备生产等行业提升生产效率与质量;物流仓储里,自主规划搬运路线,推动物流自动化。
哈博慧(轮式人形机器人,柔性灵巧手,哈工大专利,能单手玩魔方)
一一主要用于医疗保健领域,辅助医护、陪伴特殊人群;家庭服务方面,承担家务并管理家庭事务。
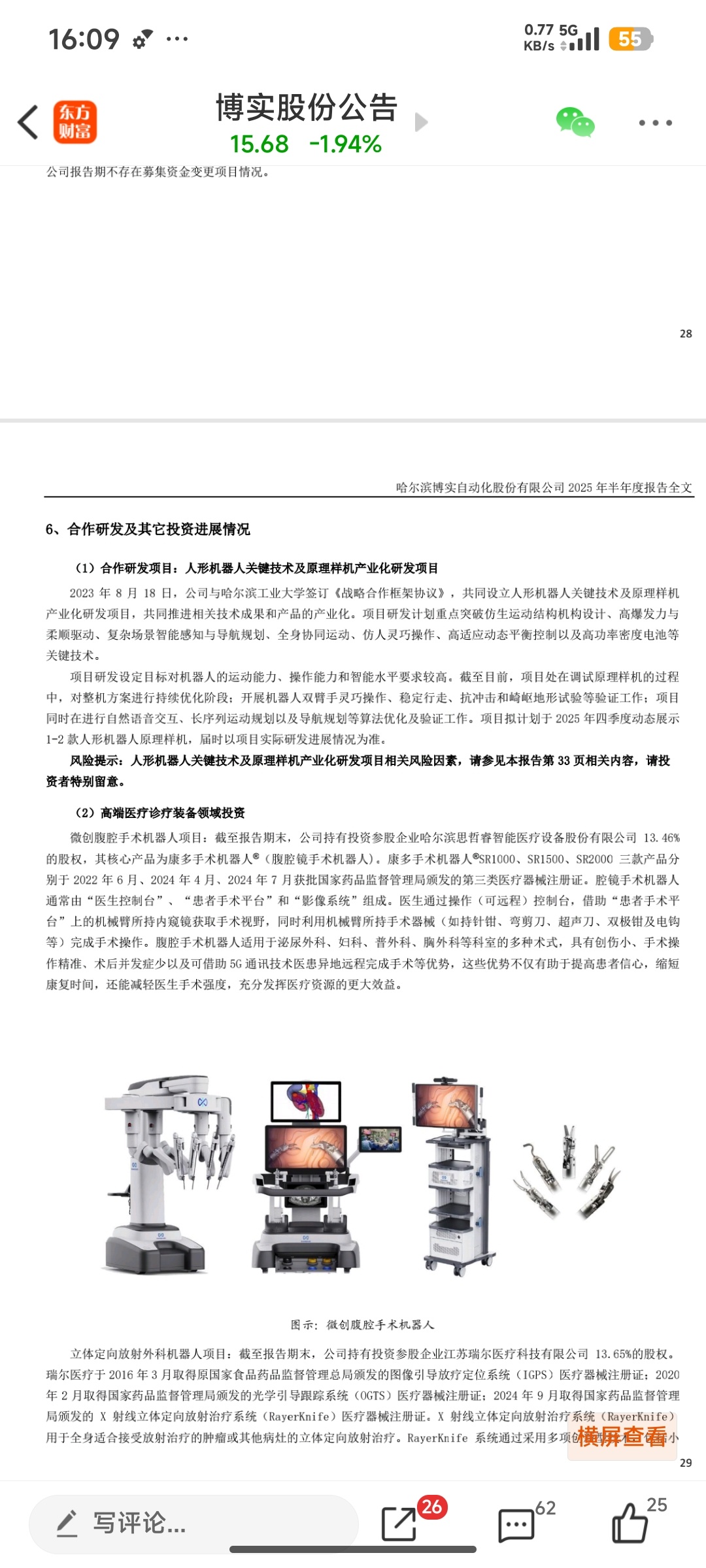
重温博实股份25年中报有关人形机器人进展情况(半年度报告第30页)一一涉及灵巧手、像人稳步行走、大脑和小脑等。
人形机器人关键技术及原理样机产业化研发项目进展情况: 项目研发设定目标对机器人的运动能力、操作能力和智能水平要求较高。
截至目前(半年报告期),项目处在调试原理样机的过程中,正处于
对整机方案进行持续优化阶段;
开展机器人双臂手灵巧操作、稳定行走、抗冲击和崎岖地形试验等验证工作;
项目同时在进行自然语音交互、长序列运动规划以及导航规划等算法优化及验证工作。
项目计划于2025年四季度动态展示1—2款人形机器人原理样机,届时以项目实际研发进展情况为准。