
L3以上自动驾驶的国家法规:出了安全事故,由车企担责。车企就变成了类似的保险公司性质。因此,即使你是游泳健将,如果去泅渡长江或海峡也必须要带上“跟屁虫”等浮具,作为“安全冗余”。
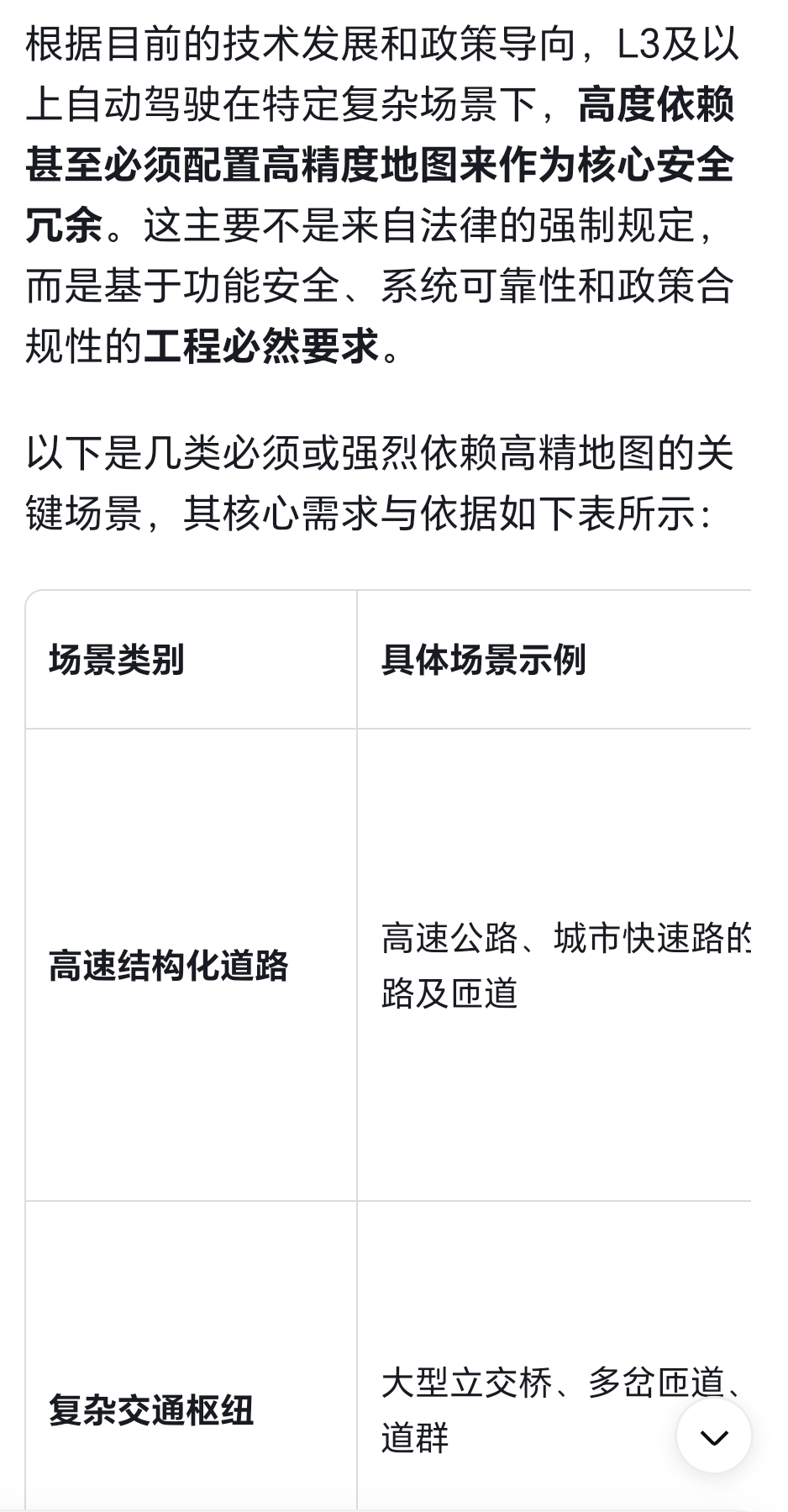
在L3级及以上自动驾驶系统中,高精度地图通常被视为关键安全冗余手段,在以下场景中其必要性尤为突出:
1. 传感器受限或失效的场景
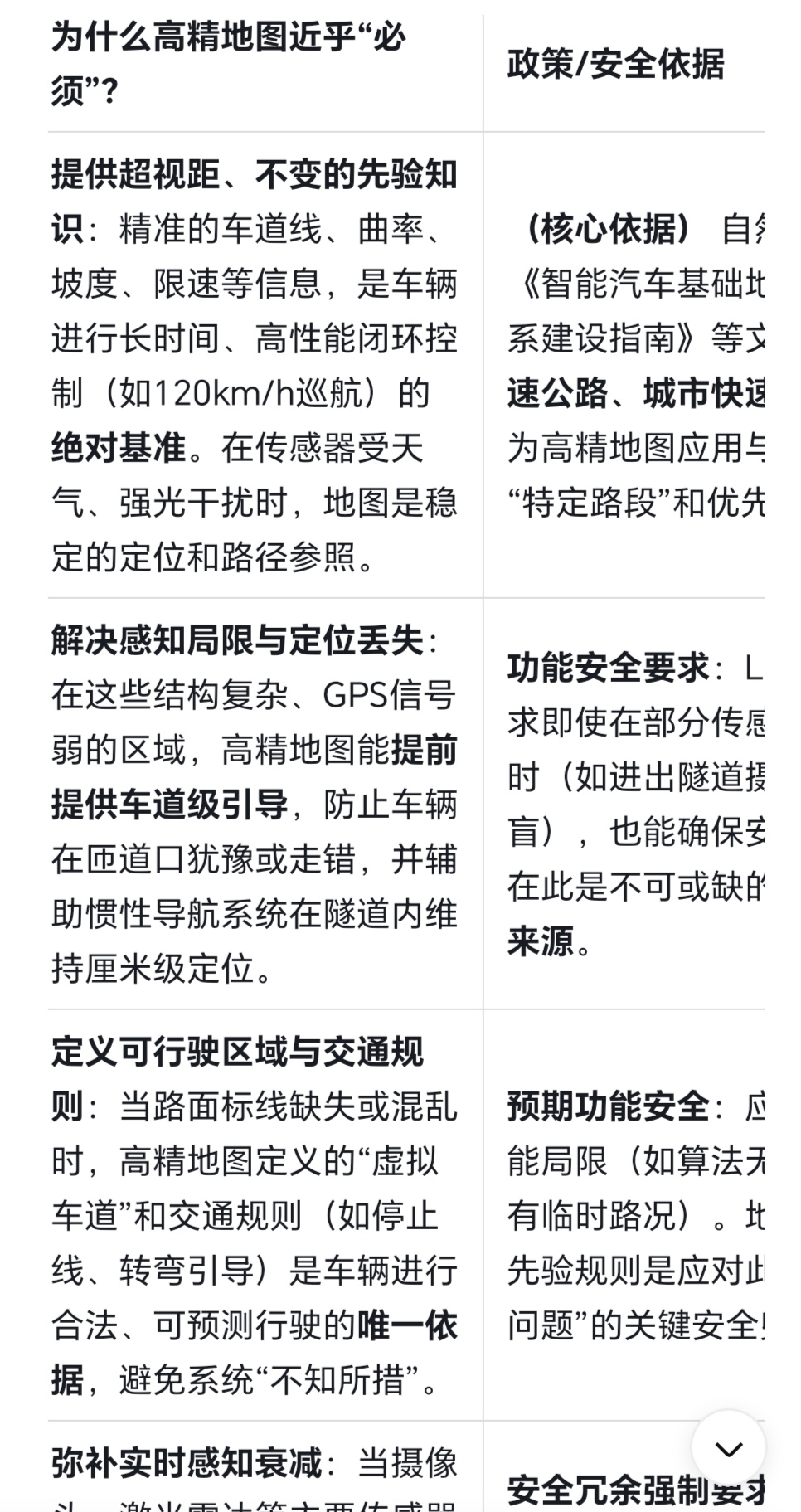
A)恶劣天气:大雨、大雪、浓雾时,摄像头、激光雷达等传感器的感知能力会严重下降。高精度地图可提供车道线、路缘、交通标志等先验静态信息,辅助车辆保持车道和路径规划。
B)隧道、地下车库:GPS信号丢失,且环境特征单调(如隧道内白墙)可能导致传感器定位困难。高精度地图可通过惯性导航 地图匹配(如车道线形状、曲率)维持精准定位。
C)逆光/强光干扰:摄像头可能无法识别车道线,地图可提供车道几何数据作为备份。
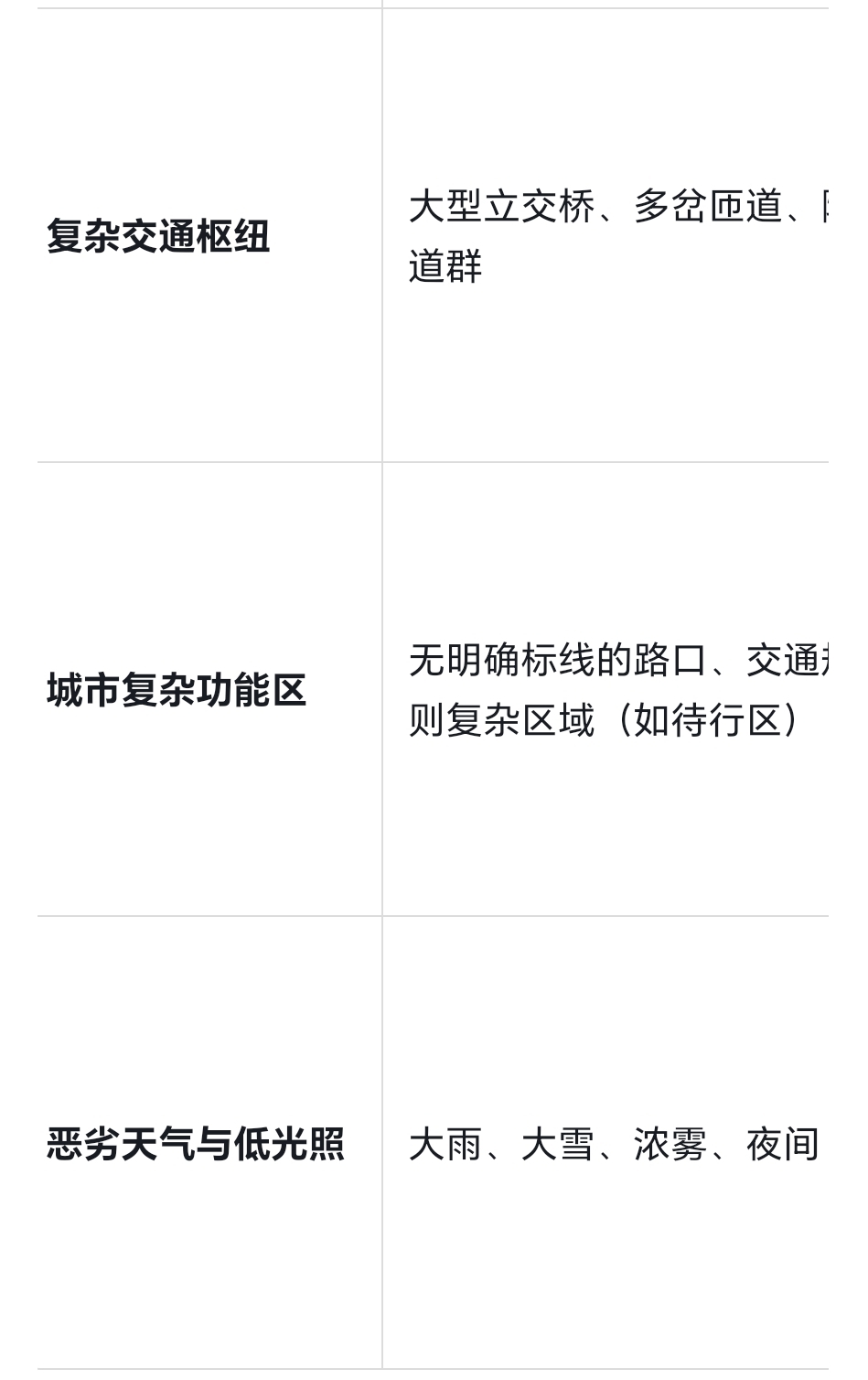
2. 复杂道路结构场景
A)多层级立交桥、复杂匝道:高精度地图能提前提供车道级拓扑关系(如“前方500米需切入右侧匝道”),避免因传感器实时识别延迟导致错过路口或危险变道。
B)无明确车道线的路段(如施工区、老旧道路):地图可提供虚拟车道参考线,结合V2X或云端更新临时路径。
C)曲率大的弯道:地图提供精确的道路曲率、坡度数据,帮助车辆提前控制车速和转向,避免因传感器视野受限(如弯道盲区)引发失控。
3. 高精度定位与规划需求场景
A)车辆密集区域(如拥堵路口):相邻车辆可能遮挡地面标线,地图可提供车道中心线参考,辅助保持车道。
B)高速场景(时速≥80km/h):对定位精度要求极高(厘米级),单纯依赖GPS IMU可能无法满足车道保持需求,需地图匹配进行纠偏。
C)上下匝道合流区:需要精确知道匝道与主路的连接点位置,以实现平滑、安全的汇入。
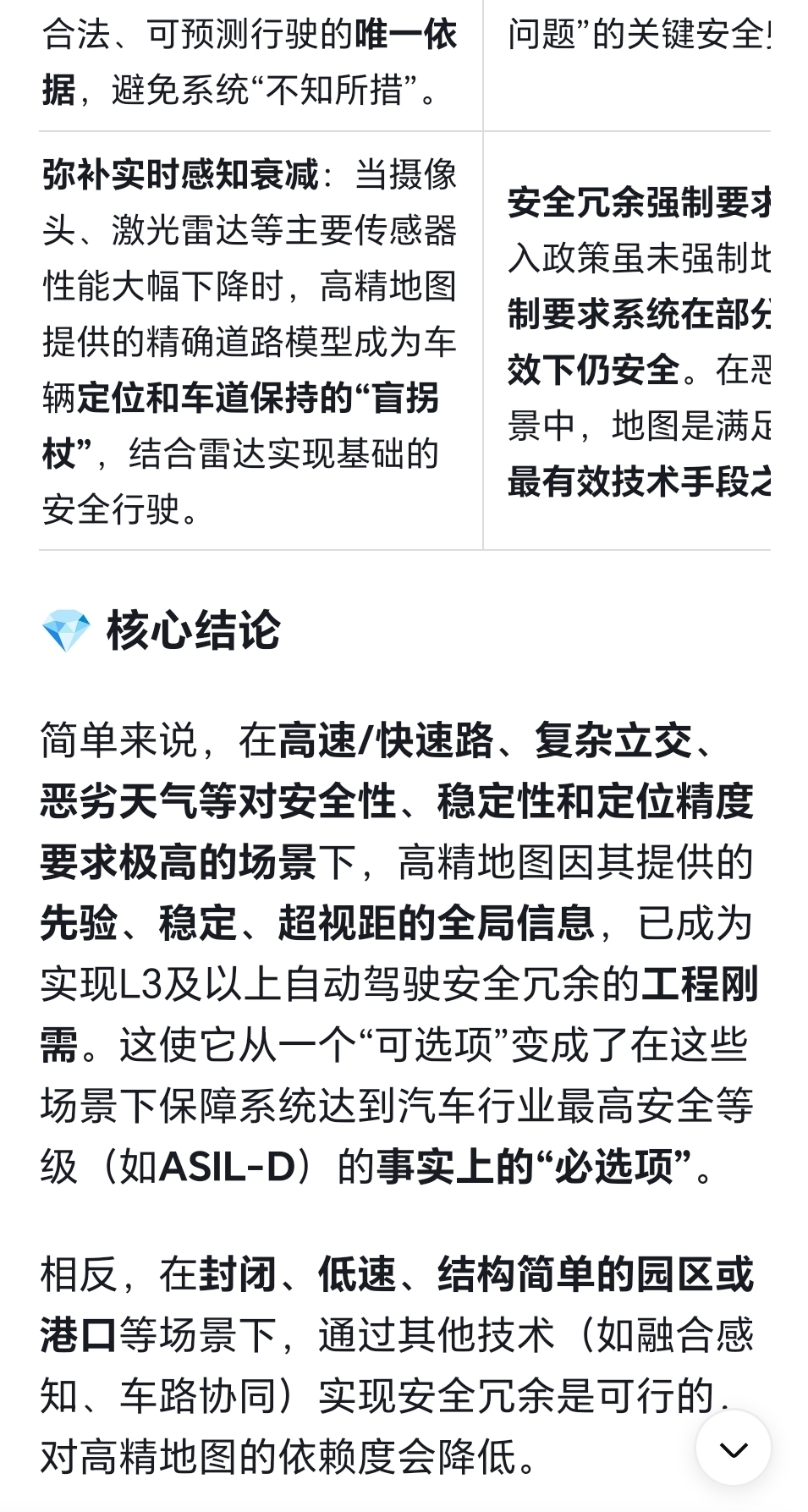
4. 安全冗余与责任界定场景(L3以上核心)
A)系统边界情况:当传感器判断出现歧义(如临时障碍物 vs 永久路障),高精度地图的静态信息可作为交叉验证依据,降低误判概率。
B)冗余定位:多传感器融合仍存在小概率同时失效的可能(如极端电磁干扰),地图可作为独立定位源,确保系统至少能执行最低风险操作(如安全靠边停车)。
C)法规与责任要求:部分地区的L3/L4法规可能要求多源信息相互验证,高精度地图作为可审计的静态基准,有助于事故责任界定。
5. 特殊交通规则与隐蔽信息
A)隐藏交通标志:如被树木遮挡的限速牌,地图可提前提供信息。
B)潮汐车道、可变车道:结合云端实时更新,地图可动态调整车道通行规则,避免违章。
