

8月9日,在北京举行的世界机器人大会上,宇树科技创始人兼CEO王兴兴发表演讲,人形机器人行业正处于“ChatGPT时刻”的前夜,最快1-2年即可实现关键突破!#传感器将迎重磅扶持政策# #利好频出,人形机器人概念大涨#
各类高精度传感器在人形机器人价值链中占比较高,且技术壁垒较为深厚,是确定性受益的方向之一。
01、传感器
传感器是获得信息的装置,能够在感受外界信息后,按一定的规律把物理量、化学量或者生物量等转变成便于利用的信号,转换后的信息便于测量和控制。
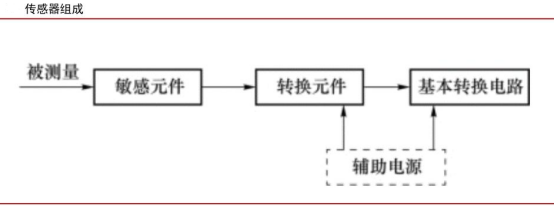
传感器一般由敏感元件、转换元件、基本转换电路组成。敏感元件是传感器中直接感受或响应被测量的部分,是输出与被测量成确定关系的某一物理量的元件。转换元件是传感器中能将敏感元件感受或相应的被测量转换成适于传输或测量的电信号部分,其输入就是敏感元件的输出。将上述电路参数接入基本转换电路(简称转换电路),便可转换成电量输出。
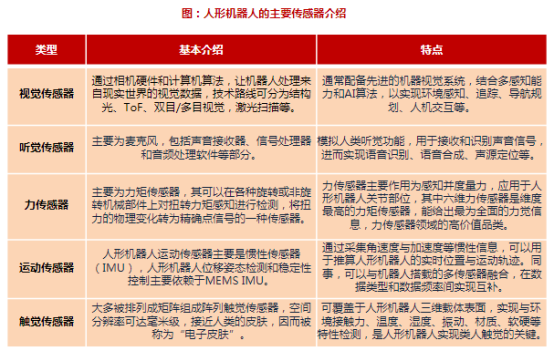
机器人上传感器是指机器人将对内外环境感知的物理量变换为电量输出的装置,一般分为内部传感器和外部传感器。根据感知物理量的不同,又可分为视觉传感器、听觉传感器、力/力矩传感器、触觉传感器和惯性传感器。
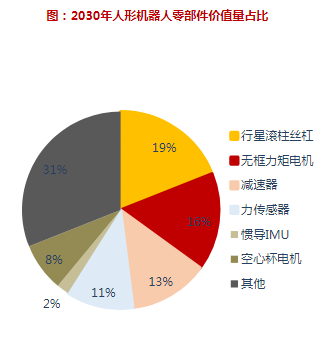
据CSDN,2030年人形机器人的零部件价值量,力传感器+IMU占比达到13%。各类传感器中,力及力矩传感器价值链占比较大。
02、视觉传感器
视觉传感器即机器视觉,可以分为3D视觉感知及2D视觉成像。在人形机器人领域,3D视觉感知技术可以让机器人获得更加准确的外部环境信息,降低误差,帮助机器人快速地进行各种动作反应。
目前主流3D测距方法主要包括单目视觉、双目视觉、结构光法、TOF飞行时间法、激光三角测距法等,在测量距离、分辨率、精度上各有侧重,适用于不同应用场景。

人形机器人视觉方案目前主要以结构光、双目或多目RGB、TOF等组合方案为主。算法基础强的厂商会采用更为简单的传感器方案,而算法相对薄弱的厂商会选择更为核心的硬件。国内大多厂商使用多传感器融合方案实现环境感知。

03、听觉传感器
机器人听力系统主要实现两个功能,一是自动语音识别,二是声源定位(本质是从所获得的信号中提取目标的位置信息)。
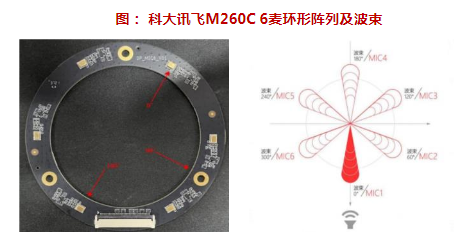
对于声源定位,传感器阵列主要是麦克风阵列,通常采用多个麦克风分布在三维空间,对空间中信号的不同方向和方位的立体感知能力有所提升。其中,MEMS麦克风正逐步成为主流的技术方案。
04、力传感器
力传感器是机器人的力控核心。通过力反馈,机器人可以实时感知与环境之间的接触力,并调整动作以适应;通过力控制,机器人可以运用这些力信息主动调整及做出动作。力及力矩传感器,可以让机器人在面对不同环境时候更加灵活,也可以提升机器人作业的可靠性。
按测量原理分类,力传感器可分为压变式、压电式、电容式、光电式等。目前应用最广的是电阻应变式力传感器:粘贴应变片的弹性体作为敏感元件,当受到外力作用时,弹性体发生形变并将形变传递给应变片,应变片丝栅形状的变化导致其阻值的变化,从而将所受力/力矩转换成电信号输出,具有精度高、测量范围广、技术成熟等优点。

按测量维度分类,力传感器可分为一维、三维、六维。一维力传感器适用于力的方向和作用点固定的场景,标定坐标轴为OZ轴;三维力传感器适用于力的方向随机变化,但作用点不变且与标定参考点重合的场景,可同时测量Fx、Fy、Fz三个分力;六维力传感器则适用于力的方向和作用点都在三维空间内随机变化的场景,能同时测量Fx、Fy、Fz、Mx、My、Mz六个分量。
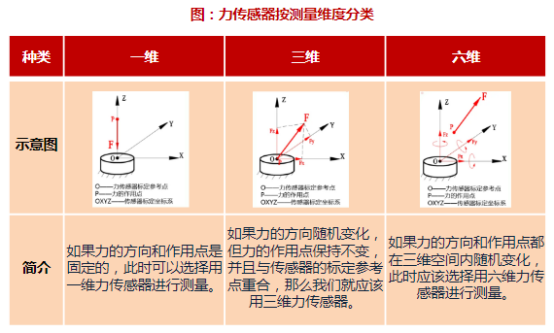
六维力传感器是维度最高的力觉传感器,它能给出最为全面的力觉信息。六维力传感器的技术难度和使用难度都比较大,结构设计、标定与检测、算法设计是六维力/力矩传感器领域的三大壁垒。
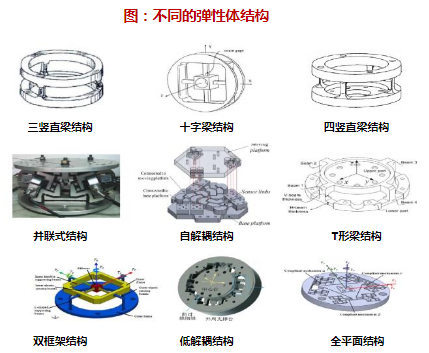
弹性体是传感器中感知外部受力信息变化的载体,是多维力传感器核心部件。弹性体结构可分为一体化结构(竖梁式、横梁式、十字梁式、圆柱式等)和Stewart并联结构两大类,一体化结构加工难度相对较低,但在测量多维力时可能存在维间耦合等问题;Stewart并联结构理论上能更准确测量多维力,但结构复杂,加工与装配难度大。
05、触觉传感器
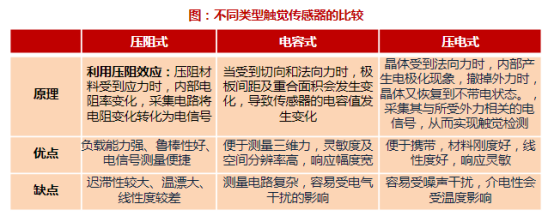
触觉传感系统通过接触来测量物体的物理特征,从而实现对周围环境的感知。触觉传感器从原理上可分为压阻式、电容式、压电式、电感式和光学式,最常用的是压阻式、电容式、压电式,比较新颖的是光学式。
触觉传感器可逐渐模拟生物皮肤的复杂属性与功能,如模拟皮肤的柔性、自愈合能力以及对细微力、温度、湿度、物体表面纹理等的感知能力。柔性触觉传感(电子皮肤)经过不断发展,在智能医疗、智能控制系统等多个领域发挥着越来越重要的作用。
电子皮肤当前面临的技术壁垒主要是难以兼顾高柔性和高弹性,且实现多种功能需要多种传感器的融合,会影响到电子皮肤的轻薄性;另外,电子皮肤传感器需要接入采集电路,复杂接线会一定程度影响活动。
由于具备特殊性能的柔性基底材料、高导电活性材料以及用于微加工的材料等价格不菲,电子皮肤生产成本居高不下,大规模生产亟需降本。
06、惯性传感器
惯性传感器是对内的传感器,是机器人运控及导航的基础。按被测物理量划分,可分为加速度传感器(加速计)和角速度传感器(陀螺仪)。将加速度计与陀螺仪整合,可以得到惯性测量单元(IMU)。IMU用于测量物体三轴的角速度与加速度,一般包含三个单轴加速度计和三个单轴陀螺仪,部分还配有磁力计。
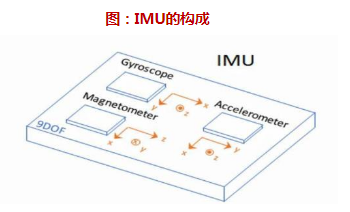
IMU能测量机器人的加速度与角速度,助力跟踪机器人姿势和运动状态;通过提供并分析实时运动数据,实现对机器人运动轨迹和速度的精确控制;还能检测机器人的偏移与倾斜,实时进行姿态稳定和调整。
07、惯性传感器
$奥比中光-UW(SH688322)$:全球3D视觉传感器重要供应商;公司全面布局结构光、iToF、dToF、双目、Lidar、工业三维测量六大3D视觉感知技术,拥有对3D视觉感知技术的深刻理解和融合创新能力。
$敏芯股份(SH688286)$:主要产品线包括MEMS麦克风、MEMS压力传感器和MEMS惯性传感器,在MEMS传感器的芯片设计、封装和测试等各方面都有技术积累。
$安培龙(SZ301413)$:产品布局包括成熟产品线温度传感器和热敏电阻,战略产品线陶瓷电容式压力传感器及储备产品线MEMS压力传感器、氧传感器、氮氧传感器、硅微熔压力传感器等;2024年公司先后发布两项为六维力传感器专利。
九鼎投资:拟收购公司南京神源生是国内少数具备六维力传感器正向研发能力的厂商之一,核心产品已送样特斯拉Optimus人形机器人项目。
汉威科技:依托子公司能斯达机器人布局触觉传感器产品;能斯达目前推出两款电子皮肤触觉模块PPT100\FPT200,可以模拟人类的触觉感知能力,实现法向力、剪切力、温度等多模态工作场景。
华依科技:近年加大对高精度惯导研发力度,实现车规级惯导技术的产品化。旗下全资子公司华依智造推出自主研发的ARU8010姿态参考传感器,供货国内某头部人形机器人制造商。
(特别说明:文章中的数据和资料来自于公司财报、券商研报、行业报告、企业官网、百度百科等公开资料,本报告力求内容、观点客观公正,但不保证其准确性、完整性、及时性等。文章中的信息或观点不构成任何投资建议,投资人须对任何自主决定的投资行为负责,本人不对因使用本文内容所引发的直接或间接损失负任何责任。)
